














小額捐款

贊助商

關於我們
香港輕新聞(Lite News Hong Kong)是一個致力於提供中立報導和獨到評論的網絡平台,成立於2015年9月。我們立足香港,關注全球的政治、時事、經濟、文化和趣聞。

中華民國榮民,中華戰略學會資深研究員,曾任海軍中權軍艦艦長,美國海軍戰爭學院績優畢業,英國赫爾大學政治學博士,目前在大學執教國際關係等政治學入門課程。勤於媒體針砭時政與探論國際現勢,亦經常接受媒體電訪;偶爾出席政論節目,評論政軍議題。
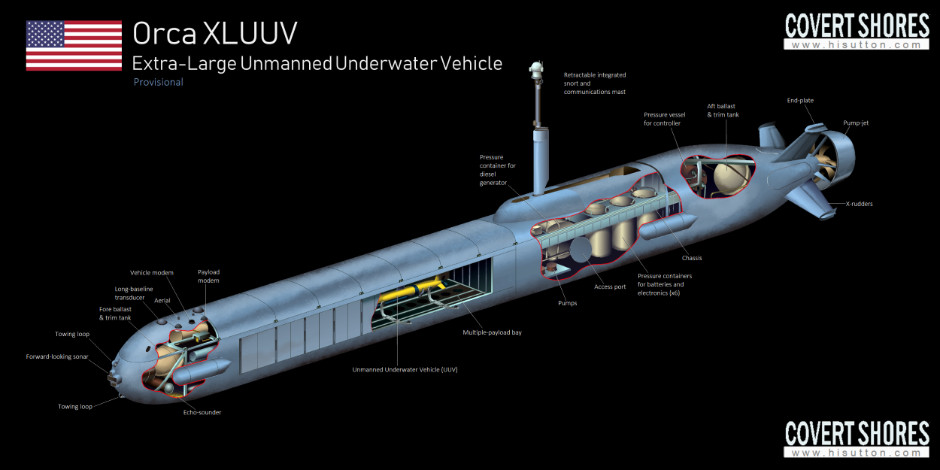 編按:美國於2019年底開始研發的虎鯨級超大型無人水下儎具(XLUUV ),這個是波音方案,擁有一個長10米且可在海中打開的載荷艙。(網絡圖片)
編按:美國於2019年底開始研發的虎鯨級超大型無人水下儎具(XLUUV ),這個是波音方案,擁有一個長10米且可在海中打開的載荷艙。(網絡圖片)
媒體報導美國國防部決心積極投入發展超大型水下無人儎具,以便獲得更多作戰儎臺,得以遂行特定海上作戰任務。其任務運用構想,從最初掃雷與佈雷作戰,將逐漸向反潛、反水面以及對地打擊任務發展。但就其技術條件對比預定作戰職能來說,仍然存在相當多思維盲點,謹以逐點陳明,祈請先進與同好不吝指正。
 編按:美國海軍未來水下無人儎具發展藍圖。事實上,由於2021財年開始海軍預算大量削減,美國亦不得不拖延一些重要的大型艦隻(如提康德烈嘉級換代計劃)的計劃大幅延後並減少生產數量,進而以更大型的無人艦隻來維持艦隻在役及執勤數目。(網絡圖片)
編按:美國海軍未來水下無人儎具發展藍圖。事實上,由於2021財年開始海軍預算大量削減,美國亦不得不拖延一些重要的大型艦隻(如提康德烈嘉級換代計劃)的計劃大幅延後並減少生產數量,進而以更大型的無人艦隻來維持艦隻在役及執勤數目。(網絡圖片)
首先必須指出,無人水下儎具在作戰運用上,必須仰賴更為複雜指揮管制系統,此因無人水下儎具在遂行任務時,僅在往返預定接戰或任務海域途中,得以仰賴人工智慧技術實施導航等基本作業,但當進入接敵交鋒或是精密作業階段,就必須仰賴管制單元不斷給予各項指令,斷然無法完全仰賴人工智慧技術,自主進行交戰或處理複雜作業。
 編按:Paul Allen 旗下搜索二戰重要沉沒艦船團隊的重要「武器」-Argus 6000系列ROV。其可以在水下穿梭殘骸之間,並進行很多微細操作。不過其控制方法是透過電纜進行操控,且亦不能離開工作母船過遠。要將水下潛航儎具軍事化及全無人化,難度可比無人空中儎具(UAV)複雜得多。(網絡圖片)
編按:Paul Allen 旗下搜索二戰重要沉沒艦船團隊的重要「武器」-Argus 6000系列ROV。其可以在水下穿梭殘骸之間,並進行很多微細操作。不過其控制方法是透過電纜進行操控,且亦不能離開工作母船過遠。要將水下潛航儎具軍事化及全無人化,難度可比無人空中儎具(UAV)複雜得多。(網絡圖片)
而傳統水下作戰儎臺所能夠在無外界支援,必須仰賴戰場臨機判斷,尤其完全獨立執行遠程情蒐、潛艦作戰或是對地遂行戰術或戰略打擊等任務項目,還是無法完全交由無人水下儎具,在未經其遠端控制人員密集管控下遂行同類任務。
因此無人水下儎具在任務全程,必須隨時能夠與其指揮管制單元進行通聯,儘管有時確實能暫時中斷聯繫,由儎具本身所設人工智慧管控單元,獨立遂行諸如定點正常航行等有限作業。但在重要任務節點,仍須與指揮管制單元重新加以通聯,回報各項狀況參數,並且受領任務執行指令,方能對敵接戰或是啟動必須精密管控之複雜作業。因此就無人水下儎具任務管制支援系統需求,整個無人水下儎具任務系統複雜性來說,到目前看來確實是項未曾受到重視之投資要項。
 編按:潛艇海底通訊模式現時仍是依靠 ELF (極低頻)或 VLF(超低頻)通訊,但以上兩種通訊的特色是......非常慢,要作為海底傳輸的遠端遙控操作,會面對資料更新的嚴重問題;另外潛艇可以用長線纜把通訊浮標升到淺水區接收訊號,但大型無人水下儎具明顯沒能拖那麼長的通訊浮標。(網絡圖片)
編按:潛艇海底通訊模式現時仍是依靠 ELF (極低頻)或 VLF(超低頻)通訊,但以上兩種通訊的特色是......非常慢,要作為海底傳輸的遠端遙控操作,會面對資料更新的嚴重問題;另外潛艇可以用長線纜把通訊浮標升到淺水區接收訊號,但大型無人水下儎具明顯沒能拖那麼長的通訊浮標。(網絡圖片)
其次就是儘管無人水下儎具不必再派遣人員於儎具內進行操作,但是指揮管制單元仍然必須派遣航行操縱控制與任務系統操作人員,假若指揮管制單元是設置在任務母艦上,則該艦運作服勤編制人員,再加上無人水下儎具指揮管制與施放回收作業人員都必須計算在人力需求之內。
 編按:大鍵琴型大型無人水下儎具,是俄國最近型號的無人水下工作儎具,同時亦將成為俄國四艘特殊工作潛艇的標準配備。(網絡圖片)
編按:大鍵琴型大型無人水下儎具,是俄國最近型號的無人水下工作儎具,同時亦將成為俄國四艘特殊工作潛艇的標準配備。(網絡圖片)
而與指揮管制無人水下儎具相關之任務支援系統與通信中繼站臺,更是完全不能缺少,同時無人水下儎具返港後所需基地勤務與廠所維修整備保養等後勤支援,再加上水文與氣象預報等作戰支援作業,其實與同等級傳統水下儎具相差並不算太多。
所以整體精算下來,不論是廣義任務執行經費,抑或是狹義任務運作損耗成本,能否真正有效節約預算,恐怕必須審慎思考。目前美國五角大廈係以核潛艦維持經費對比無人水下儎具作業成本,此種計算方式恐怕確實是誤導各方思維軸向。
再者必須提醒,操作控制無人水下儎具執行任務時,操作人員對於戰場感知與狀況掌握模式,其實是與傳統水下儎具大不相同,因此絕對不可認為只要將潛艦部隊現有潛艦操控人員直接轉任,就能夠順利轉換擔任無人水下儎具操縱人員。在遠端透過遙控系統操縱控制無人水下儎具,往往因為無法透過本身體感,來掌握無人水下儎具航行狀態與運動姿態,因此有可能產生與實際水下航行操控有所落差之操作模式與反應。
 編按:英國Manta超大型無人水下儎具的驗證艇。大國海軍現在都似乎熱衷於大型與超大型水下無人艇的開發工作。(網絡圖片)
編按:英國Manta超大型無人水下儎具的驗證艇。大國海軍現在都似乎熱衷於大型與超大型水下無人艇的開發工作。(網絡圖片)
特別是潛艦操作人員在實際操作潛艦運動時,其對戰場感知與狀況掌握所需資訊,不僅是來自潛艦所配備各項感測器與儀表,其亦須透過本身五官來獲致本身所處狀態相關資訊。但若僅是透過遙控系統,在遠端對無人水下儎具實施運動操縱控制時,就不免就會感到是隔靴搔癢。同時在管控偵雷、除雷、佈雷或是其他反潛與反水面武器系統時,就算亦是透過感測器獲得資訊,但總是缺乏臨場感,能否如現場操控同樣得心應手,值得深入探究。
此外水下通信受到環境因素影響,確實是在通信量與效率上是有所限制,假若在精密管控各項武器系統或作業裝備階段,發生通訊不良狀況,讓無人水下儎具操作人員無法獲得無人水下儎具本身姿態、運動軌跡以及目標動態等足夠參考資訊時,其實就很難遂行指定任務,或是與敵交鋒時不致產生誤擊誤判現象。
誠然運用無人水下儎具作業母艦作為前進管控任務平臺,或是通信中繼站臺,確實會有助於解決必須密集進行水下通信之困境。但是當作業母艦接近指定之預期接戰海域與特定任務目標區時,其實亦會同時增加其遭致敵手攻擊加以襲殺之風險,同時此亦是減損原先預備運用無人水下儎具之原始意旨。
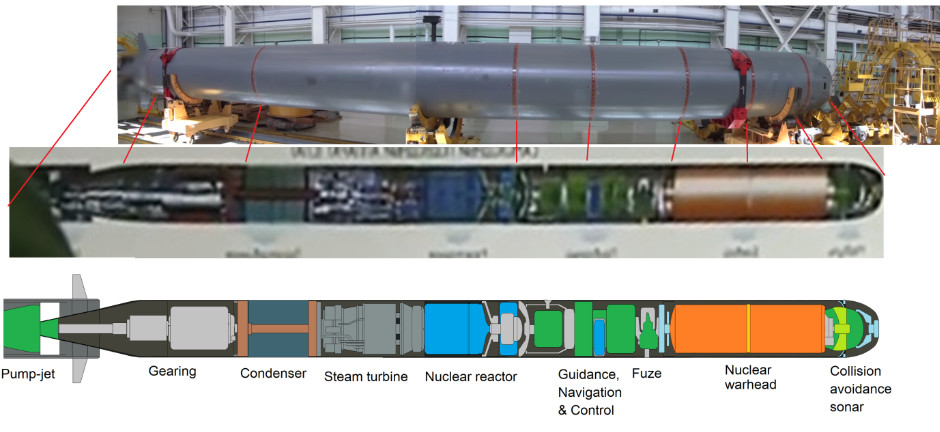 編按:有可能是第一種實用化的超大型無人水下戴具-俄國的海神核動力超大型魚雷,續航能力及動力可說「超班」,不過其任務就簡單得多,就是進行水下戰略核攻擊。(網絡圖片)
編按:有可能是第一種實用化的超大型無人水下戴具-俄國的海神核動力超大型魚雷,續航能力及動力可說「超班」,不過其任務就簡單得多,就是進行水下戰略核攻擊。(網絡圖片)
此外運用無人水下儎具是否將會如同無人飛行儎具產生誤擊誤傷,其實是發展此等系統必須加以正視問題。1915年5月7日英國郵輪盧西塔尼亞號(RMS Lusitania)遭致德國潛艦擊沉,成為美國決心參與歐洲戰事重要因素。此種歷史教訓確實是運用水下無人儎具進行反水面作戰任務時,無法迴避之重大心理壓力。
 編按:英國郵輪盧西塔尼亞號(RMS Lusitania)於1915年被德軍U20潛艇擊沉,間接導致美國參加一戰。試想想將來大型水下無人儎具也要參與攻擊行動,但因為水下通訊問題,若在深海的話,遙控人員也沒法實時遙控潛艇,同樣較易造成誤擊;若交給艇上AI處理,則可能出現AI誤判而導致誤擊目標甚至造成大量平民死傷的國際事件,並可能令自己處於道德及國際法上的不利地位。(網絡圖片)
編按:英國郵輪盧西塔尼亞號(RMS Lusitania)於1915年被德軍U20潛艇擊沉,間接導致美國參加一戰。試想想將來大型水下無人儎具也要參與攻擊行動,但因為水下通訊問題,若在深海的話,遙控人員也沒法實時遙控潛艇,同樣較易造成誤擊;若交給艇上AI處理,則可能出現AI誤判而導致誤擊目標甚至造成大量平民死傷的國際事件,並可能令自己處於道德及國際法上的不利地位。(網絡圖片)
同時經過醫學研究指出,將操作人員透過遙控鏈路與戰場隔離,其實並無法完全避免誤擊誤傷或是過度暴力事件,對於操作者產生重大心理衝擊;而無人水下儎具整個戰場狀況感知程度較無人飛行儎具更差,因此更須審慎以免產生誤擊誤傷事件徒生枝節。
在此必須強調,針對無人水下儎具之戰場搜救作業,基本上根本乏人重視,就維護後續任務安全角度思考,儘可能將遭致擊沉之無人水下儎具撈取回收,其實仍有探討空間。假若真是很難搜尋撈回,則重要機敏零組件就必須加裝保密自毀裝置,並應將其列為標準配備。
 編按:2006年朝鮮在某海灘上發現一件像重型魚雷的大型無人水下儎具,有編輯經過詳細考證,認為這是一件水下雷區偵察儎具,而且很可能和早年的NMRS計劃有關,不過公開資料顯示,該計劃在造了兩艘原型艇後就已於2005年中止。這事作告訴我們兩件事:1. 很多已終止的軍事計劃其實可能未有終止;2. 這類儎具一旦損壞而又無人回收,很易落入對手手上。(網絡圖片)
編按:2006年朝鮮在某海灘上發現一件像重型魚雷的大型無人水下儎具,有編輯經過詳細考證,認為這是一件水下雷區偵察儎具,而且很可能和早年的NMRS計劃有關,不過公開資料顯示,該計劃在造了兩艘原型艇後就已於2005年中止。這事作告訴我們兩件事:1. 很多已終止的軍事計劃其實可能未有終止;2. 這類儎具一旦損壞而又無人回收,很易落入對手手上。(網絡圖片)
最後要提醒,儘管無人水下儎具因操作者不必親臨接戰海域與作業目標區,此種作法或可提升人員安全,但諸多任務考量因素未見得會被完全顛覆,同類作業成本亦未見得能夠縮減。各國國防體系研發新作戰系統與儎臺時,求新求好是普遍風氣,但有時確實會只見其利而未見其弊。
作者張競先生簡介:中華民國榮民,曾任海軍中權軍艦艦長,美國海軍戰爭學院績優畢業,英國赫爾大學政治學博士,目前在大學執教國際關係等政治學入門課程。勤於媒體針砭時政與探論國際現勢,亦經常接受媒體電訪;偶爾出席政論節目,評論政軍議題。著述文稿課題廣泛,獲得讀者極多迴響。
手機分享本文:




香港輕新聞(Lite News Hong Kong)是一個致力於提供中立報導和獨到評論的網絡平台,成立於2015年9月。我們立足香港,關注全球的政治、時事、經濟、文化和趣聞。